




Беспилотный транспорт будущего
Сегодняшняя глобальная транспортная система не в состоянии обходиться без человека, вернее, без миллионов работников, представляющих профессию шофера. А теперь давайте экстраполируем ситуацию и вообразим, что улицы больших и малых городов заполонили беспилотные транспортные средства. Сегодня это звучит как фантастика, тем не менее уровень современной технологии поднялся до уровня воплощения таких идей в реальность, по крайней мере, в ближайшей перспективе.
Что может дать экономике использование грузовых автомобилей без водителей? Первое, что приходит на ум, – значительное увеличение рентабельности транспортного бизнеса, так как ежемесячную зарплату «электронному шоферу» платить необязательно и, следовательно, можно сократить персонал. Работать автомобиль начнёт в режиме 24/7, т. е. без перекуров, круглосуточно и семь дней в неделю. Сюда можно добавить полное отсутствие последствий человеческого фактора: воровство, прогулы, неисполнительность.
Второе, что приходит на ум, – кардинальное улучшение безопасности движения. Никто за рулем не уснёт, не устанет, не будет нарушать скоростной режим, не будет отвлекаться и не почувствует себя плохо после вчерашнего застолья.
Беспилотное транспортное средство всегда движется с оптимальной скоростью и точно соблюдает все предписанные дорожные правила. Его удобно использовать в небезопасных военных миссиях и во вредных для человека средах.

Третье – возникнут коммерческие автомобили новой конструкции с изменённым интерьером кабины водителя или, вернее, с полным её отсутствием. Это может существенно снизить стоимость транспортного средства, а также позволит увеличить его полезный объём и грузоподъёмность.
Таким образом, перспектива беспилотного автотранспорта полна весомых позитивов. Современные автомобили уже напичканы сложными техническими устройствами, позволяющими делать движение транспортных средств по дорогам безопасным и эффективным. Из недавних новинок можно, например, вспомнить систему экстренного торможения Active Brake Assist. Эта технология позволяет поддерживать безопасный интервал между движущимся грузовиком и транспортным средством, следующим впереди него. Установленный в передней части автомобиля радиолокационный датчик определяет расстояние до следующей впереди машины. Контроллеры системы непрерывно регистрируют и анализируют дистанцию и собственную скорость движения относительно догоняемого объекта. Если же эта дистанция начнёт стремительно сокращаться и возникнет риск столкновения, то активная система генерирует ряд предупредительных сигналов. И в случае, если водитель останется безучастным, то Active Brake Assist включает режим экстренного торможения машины.
Достоин внимания недавно разработанный за океаном автоматический регулятор скорости движения для тяжёлых грузовиков под названием RunSmart™. Суть этой технологии, помогающей экономить топливо, сводится к комбинированию системы позиционирования GPS с цифровой трёхмерной 3D картографией фирмы Navteq. В результате этого объединения электронный контроллер грузовика оценит и просчитает дорожный профиль маршрута на милю вперед и заранее определит самую эффективную с точки зрения расхода топлива скорость транспортного средства. То есть автомобиль буквально «читает» дорогу вперёд, в отличие от стандартной системы круиз-контроль, когда машина «пробует» поддерживать скорость независимо от ландшафта.
Да, сейчас эра машин без водителей просматривается лишь на горизонте, но разработкой этой технологии уже вплотную занимаются несколько зарубежных фирм. Например, немецкая компания Götting KG выпускает внутрицеховые автоматизированные транспортные средства для промышленных предприятий. Тут надо добавить, что сегодня только на больших заводах и крупных складах в Европе трудятся более 30 000 роботизированных тележек, электронная архитектура которых вполне может быть взята за основу будущих беспилотных автомобилей.
Успех роботизированных тележек можно объяснить несколькими обстоятельствами. Их маршруты движения заранее запрограммированы, устранены все препятствия и «неожиданности», т. е. окружающая среда идеально приспособлена для движения автоматизированных машин. Внутризаводские «беспилотники» двигаются не быстро, выдерживают дистанцию около метра и оснащены достаточно простыми, надёжными устройствами безопасности, предотвращающими столкновения. Для них не проблема погодные условия, ведь трудятся они в помещении, и всегда рядом инженеры и техники, готовые по первому зову оказать нужную помощь.

Используя наработки заводских транспортных машин, можно сформулировать основные проблемы, препятствующие внедрению автоматизированных транспортных средств на дорогах общего пользования.
В списке главных нерешённых вопросов первое место занимает проблема внедрения беспилотных автомобилей в уже существующую структуру дорожного транспорта. На втором месте проблема безопасности, тоже связанная с человеческим фактором, т. е. предотвращение столкновений автомобилей, управляемых водителями, и машин с электронным управлением. Следующим пунктом по важности ставится надёжность работы датчиков электронного управления, а также возможность их оперативного реагирования на меняющиеся погодные и дорожные условия. Но самым сложным для исполнения является всё же четвёртый пункт, он близок к идее создания искусственного интеллекта. Современные машины пока не способны самостоятельно принимать решения, если на маршруте движения кардинально изменилась ситуация.
Компании Demag и Götting KG уже создали тяжёлые автоматизированные транспортные средства AGV (Automated Guided Vehicle) – контейнеровоз без кабины и без водителя, работающие на больших портовых терминалах и предназначенные для перевалки морских контейнеров массой до 90 т. Транспортные роботы вполне успешно справляются со своей работой, но в пределах ограниченной территории.

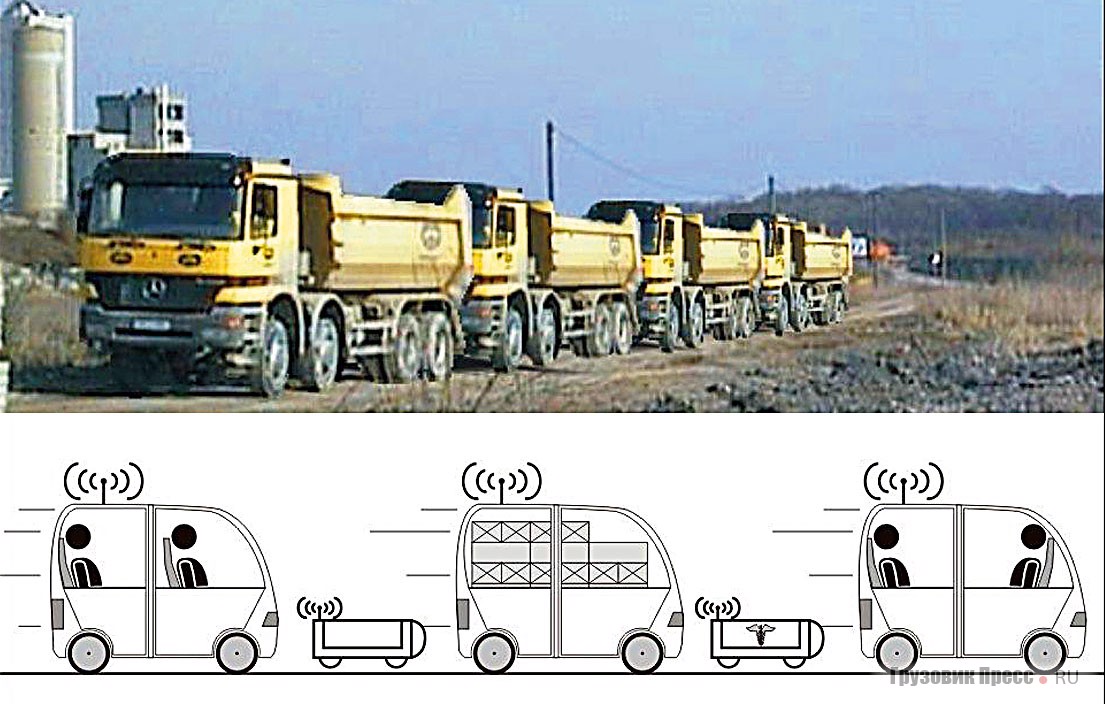
Говоря о перспективе, надо отметить экспериментальные образцы, созданные в последнее время. Так, в прошлом году фирма Götting KG на опытных образцах продемонстрировала собственную технологию автоматизированного управления автомобильным конвоем, состоящим из нескольких самосвалов. Передовой машиной каравана управлял профессиональный водитель, а электронные устройства, смонтированные на его грузовике, отслеживали его действия и передавали их по радиосвязи в виде команд остальным контроллерам, установленным в транспортных средствах, следующих в конвое. В этом эксперименте ответственность за безопасность конвоя несёт водитель. Он контролирует маршрут, объезжает дорожные препятствия, при плохой погоде или при неблагоприятных условиях движения снижает скорость, а роботы отслеживают и повторяют все его телодвижения. Для эксперимента были использованы стандартные грузовые автомобили, дооснащённые немецкими специалистами. Каждое ведущее транспортное средство в конвое и все последующие связаны радиосвязью. Контроллер передового автомобиля посылает сигналы машинам-последователям, в которых есть информация относительно скорости движения, угла поворота рулевого колеса, нажатия педали акселератора или приведения в действие тормоза. Таким образом, каждый ведомый автомобиль получает очень точную информацию об ускорении или торможении ведущей машины, а также всех событий, которые необходимо продублировать. В тестируемых образцах все ведомые автомобили были оборудованы лазерным сканером, чтобы более тщательно контролировать все движения впереди идущего транспортного средства. Стоит добавить, что каждый грузовик, «заряженный» для конвойной работы, достаточно просто отключить от дистанционного управления, и по прибытии его на место назначения шофер сядет в кабину и дедовским способом проведет маневрирование и поставит машину под разгрузку. Подобными конвойными экспериментами несколько лет назад занималась существовавшая тогда корпорация Daimler-Chrysler. Совместно с учёными европейских университетов и специалистами других автопроизводителей американские конструкторы разрабатывали технологию управления колонны беспилотных дальнобойных автопоездов, двигающихся по автомагистралям между штатами.

В начале 2011 года были обнародованы результаты успешного испытания системы SARTRE (Safe Road Trains for the Environment, или Безопасные дорожные поезда для окружающей среды), финансированной бюджетом ЕС. Проект осуществила Volvo Truck Corporation через свою дочернюю корпорацию Volvo Technology Corporation в сотрудничестве с инженерами других европейских компаний. Резюмируя свои эксперименты, шведы говорят, что их разработка способна улучшить многое. Во-первых, улучшается дорожная безопасность, так как минимизируется негативное влияние человеческого фактора, который, по статистике, является причиной почти 90% дорожно-транспортных происшествий. Во-вторых, движение в конвое способствует экономии горючего (около 20%) в зависимости от скорости движения, геометрии транспортного средства и зазора между автомобилями. Далее, водители, находящиеся в ведомых грузовиках, смогут спокойно довериться электронике и отдохнуть от работы. К тому же движение грузовых караванов по трассам поспособствует разгрузке автодорог, так как интервалы между автопоездами уплотнятся.
Разработка массового применения этой технологии сейчас идет полным ходом и, вероятно, через несколько лет сможет стать стандартной для вновь выпускаемых грузовиков. Но кроме технологических аспектов для внедрения SARTRE могут уйти годы на утверждение её в законодательном порядке в 25 странах Евросоюза. С другой стороны, финансируемые эксперименты и понимание сложности юридического аспекта показывают, что в Европе ощущают перспективу в беспилотном транспорте и начинают постепенно двигаться в этом направлении. И уже сейчас можно уверенно сказать, что автомобили будущего будут работать без водителей и без ДВС.
Беспилотные автобусы
Необычные автобусы под названием «Зет-капсула» (Z-Capsule) разработала компания Toyota. Полное название новинки – «Интеллектуальная многорежимная транзитная система» (Intelligent Multimode Transit System – IMTS).
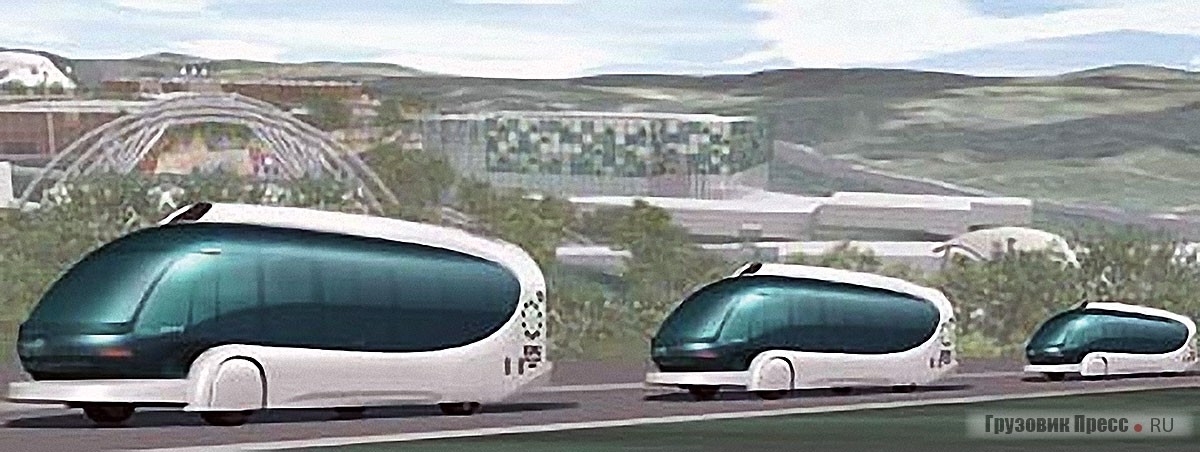
Автобусами, имеющими большую площадь остекления и футуристический дизайн, будут управлять компьютеры. Выдерживать заданный маршрут они будут благодаря магнитным маркёрам, встроенным в асфальт. Разумеется, предусмотрены системы предотвращения столкновений с другими машинами и наездов на пешеходов.
Самое интересное – эти автобусы смогут объединяться в виртуальные поезда, следуя друг за другом на минимальном расстоянии. Виртуальные они потому, что механической связи между машинами не будет – лишь электронная. При этом в любой момент, повинуясь программе, поезд может «рассыпаться», а автобусы – действовать самостоятельно, чтобы, например, высадить и принять пассажиров. А потом машины снова смогут собираться вместе, чтобы в экономичном режиме пробежать «слётанной» группой большую дистанцию между пунктами назначения.