







Земная составляющая лунной программы
ЗИЛ-135Ш – транспортер-тяжеловоз для транспортировки крупногабаритных блоков ракетоносителей
В начале 1960-х годов США и СССР развернули невиданную ранее по накалу страстей «лунную» гонку. Каждая из сверхдержав стремилась первой побывать на спутнике Земли. Были в этой истории и сложнейшие земные проблемы. Об одной из них и рассказывается в статье.
Чтобы управляемый полет на Луну стал реальностью, требовались поистине фантастические по мощи корабли. Соединенные Штаты сконцентрировали усилия на создании гигантского ракетоносителя «Сатурн-5», а Советский Союз – не уступающего ему космического исполина Н-1. В СССР проектирование суперракеты поручили ОКБ-1, которым руководил академик С.П. Королёв. Изготавливать изделие должны были на заводе в Куйбышеве (ныне Самара). В процессе разработки возникла группа сложнейших вопросов, и главные – это как и в каком виде доставить Н-1 за сотни километров на Байконур, а кроме того, каким образом осуществлять сборку ракеты, состоящей из огромных, в десятки тонн, блоков.
Скоро стало ясно, что кроме железнодорожного транспорта других средств доставки ракетоносителя на стартовую площадку не существует. Дело усугубляло и то обстоятельство, что правила перевозки грузов по железной дороге строго требовали разделить крупногабаритные составные части ракеты на более мелкие элементы. Это означало, что для изготовления носителя непосредственно на космодроме надо было возвести предприятие, где станут проводить окончательную сборку изделия, включая сложнейшую сварку сферических баков для топлива.
Эти обстоятельства не добавляли оптимизма сотрудникам ОКБ-1, и без того обремененным массой иных задач. Кроме того, окончательная сборка на космодроме была невозможна без привлечения большого числа специалистов для работы на Байконуре и, самое главное, затягивала процесс подготовки ракетоносителя.
Руководители подразделений ОКБ-1, проанализировав, казалось, тупиковую ситуацию, пришли к выводу, что необходимо продолжить поиск решения возникшей проблемы транспорта. После тяжелой, изнурительной работы был найден оптимальный способ перевозки составных частей Н-1 на космодром. По замыслу идеологов этого проекта ракетные блоки надлежало перевозить не по железной дороге, а на барже от Куйбышева до Гурьева вниз по Волге, после чего эстафета передавалась тяжеловозному автомобилю-транспортеру. Он-то и должен прямо по степи доставлять оборудование на космодром. Конструкция баржи, предназначенной для перевозки военной техники, была также с секретом. Для прохождения под низкими пролетами мостов корпус судна можно было частично притапливать. Теперь все упиралось в сухопутную машину грузоподъемностью не менее 25 т.
С.П. Королёв, изучив предложения своих сотрудников, моментально оценил, какие преимущества таит в себе данный способ транспортировки. Габариты грузового отсека и полезная нагрузка транспортера позволяли полностью собранную и испытанную на предприятии-изготовителе третью ступень со смонтированной на ней основной аппаратурой системы управления космическим кораблем доставить на место назначения целиком.
Проработкой нового проекта занялись инженеры ОКБ-1 во главе с В.П. Петровым. В сжатые сроки были подготовлены предварительные требования к основным характеристикам колесного тяжеловоза с учетом габаритов и массы груза. Работы по новому объекту лично контролировал С.П. Королёв.

У разработчиков сразу возникла проблема с подбором движителей, способных выдерживать большие нагрузки: в номенклатуре отечественного автопрома не было колес с шинами 3-метрового диаметра, а покупка за рубежом была невозможна из-за дефицита валюты. Шасси, важнейшими элементами которого являлись опорные стойки от пассажирского авиалайнера Ил-18, чтобы не прекращать работу, решили оснастить 1,5-метровыми отечественными колесами. Далее следовало определиться, кто же возьмется за создание транспортера-тяжеловоза – БелАЗ, НАМИ или ЗИЛ. Особые надежды связывали с БелАЗом: предприятие уже освоило серийный выпуск внедорожных автомобилей-самосвалов грузоподъемностью 25 т и более. Однако белорусов, как и руководство столичного НАМИ, смутили сложность, ответственность предстоящей работы и сжатые сроки проекта. Только на ЗИЛе высказали иное мнение. На совещании, куда С.П. Королёв пригласил главных конструкторов СКБ ЗИЛ, Московского агрегатного завода «Дзержинец», входящего в структуру Минавиапрома, и Физического института Академии наук СССР (ФИАН), главный конструктор СКБ ЗИЛ В.А. Грачёв заявил о готовности его организации спроектировать транспортное средство, способное по бездорожью перевозить 100-тонный груз!

Присутствующие были и шокированы, и обрадованы. При таком раскладе получалось, что доставлять на Байконур вторую и третью ступени можно будет целиком, а первую ступень разбирать лишь на три блока. По предложению С.П. Королёва ведущей организацией по разработке и постройке новой машины становится СКБ ЗИЛ. За «Дзержинцем» осталась автоматика и система управления движением, ФИАН отвечал за расчет грузонесущей рамы транспортера. ОКБ-1 взялось подготовить техническое задание, осуществлять общее руководство и оказывать необходимую помощь в работе со смежниками и вышестоящими инстанциями.
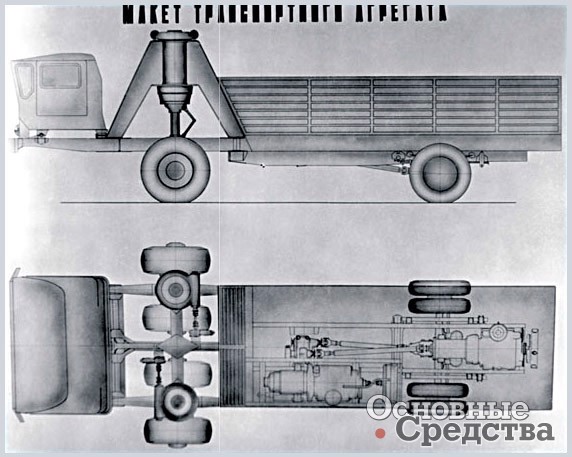
СКБ ЗИЛ наряду с другими исполнителями получило задание разработать необычное транспортное средство – невиданную ранее 12-осную полноприводную машину полной массой от 80 до 105 т, став полноценным участником лунной программы. Летом 1967 г. из
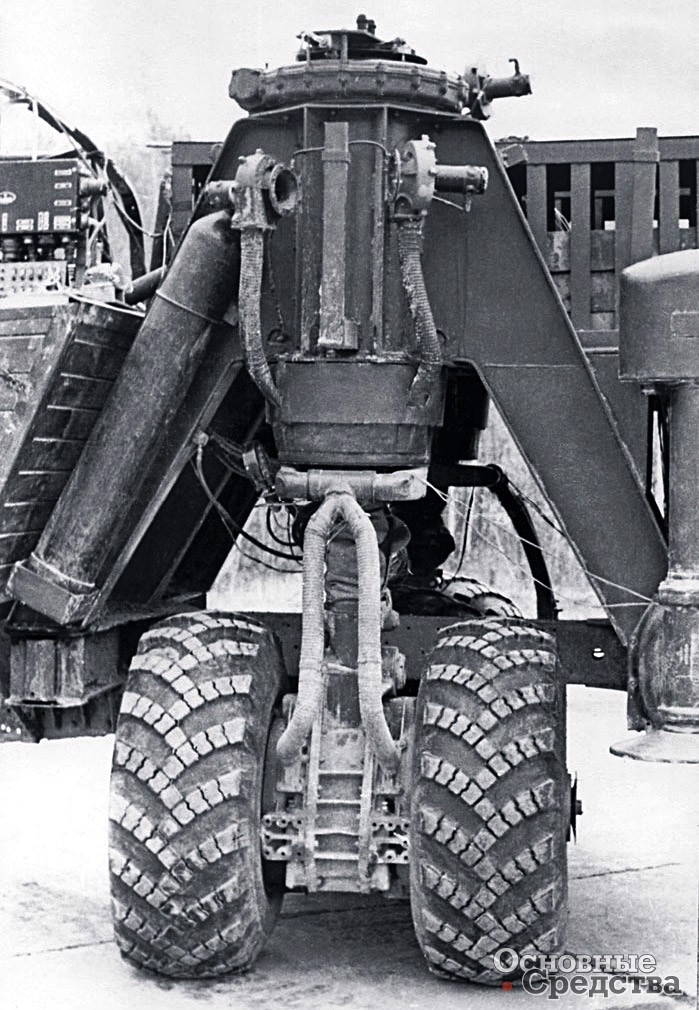
ворот опытного производства СКБ вышла машина, какой в мировом автостроении до сих пор не было. В ее конструкции все было нестандартным, даже колесная формула 4х4+2х2, поскольку были задействованы сразу два разных типа трансмиссии – электромеханическая и гидромеханическая, и каждая с собственным двигателем. Один двигатель размещался в средней части автомобиля, другой – в задней части. Непривычно и расположение ведущих колес – четыре передних устанавливали не последовательно одно за другим, а параллельно на одной поперечной оси. Передняя пара колесных стоек с пневмогидравлическими амортизаторами телескопического типа, как у шасси самолета Ил-18, по техническому исполнению практически повторяла колесные опоры, которыми хотели оборудовать транспортер-тяжеловоз.


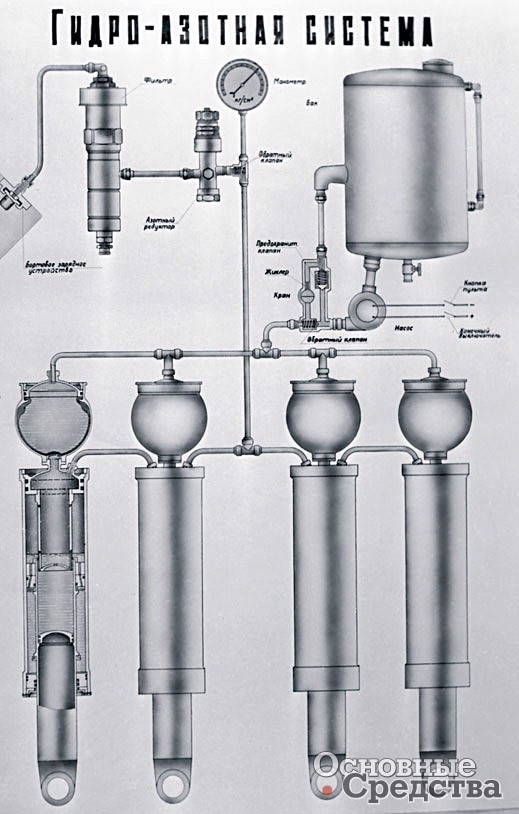
Каждая стойка объединяла функции направляющего, упругого и гасящего устройств и потому была выполнена в виде герметичного сосуда, в котором находятся строго дозированные объемы рабочих тел – жидкости (масла) и газа (азота). При внешней нагрузке поршень со штоком входит в цилиндр, заставляя тем самым перетекать масло из одной полости в другую. К опорным кронштейнам несущей рамы макета стойки крепились с помощью верхних и нижних подшипников, благодаря чему обеспечивался их поворот вокруг вертикальной оси. Полный ход подвески составлял 450 мм.
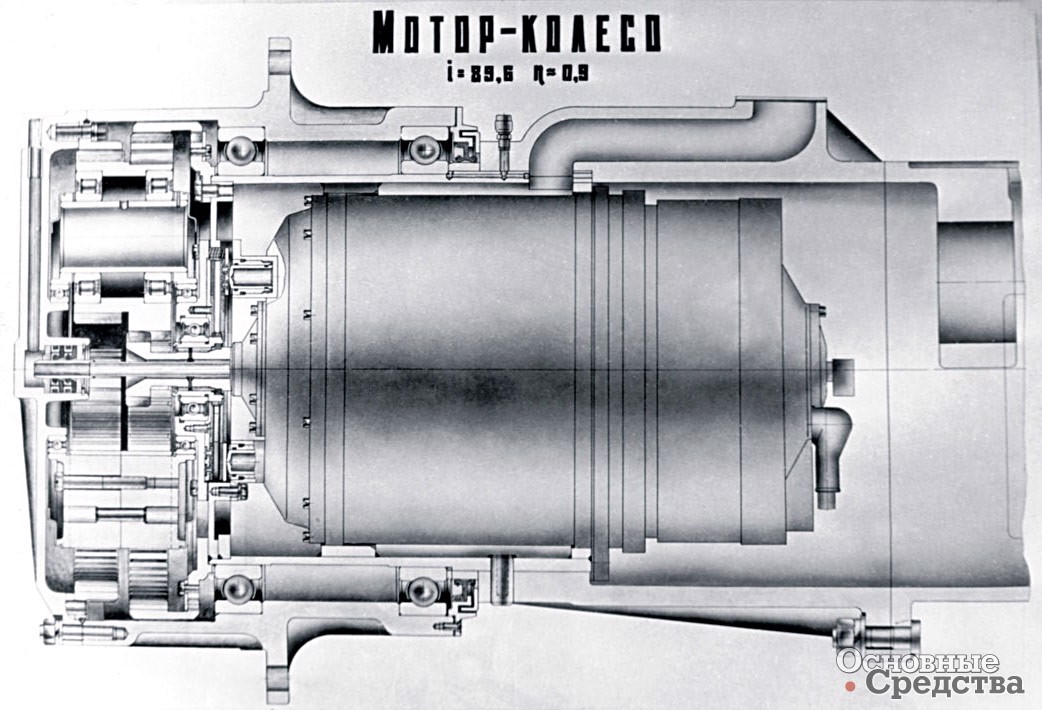
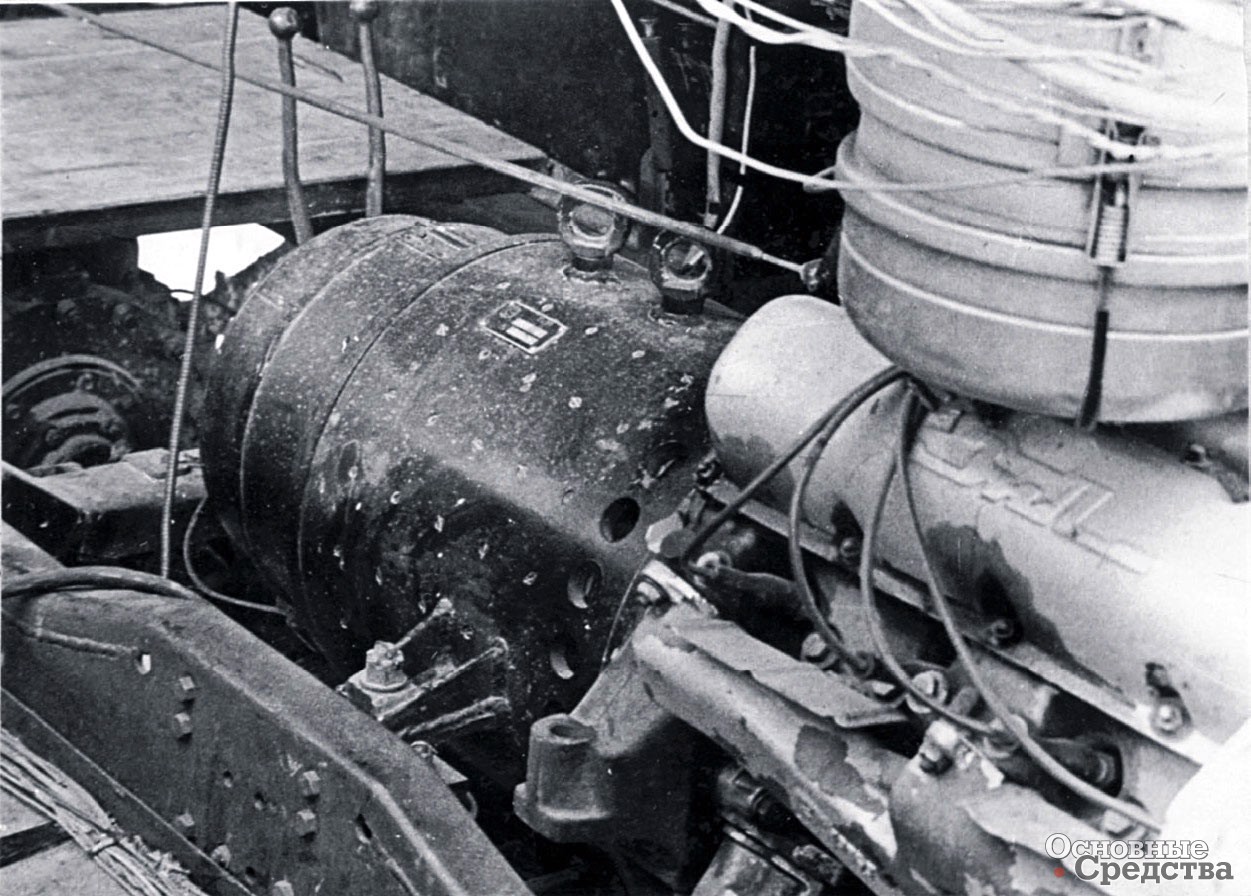
В ступицу каждого из четырех передних колес (по два на стойку) был встроен электродвигатель постоянного тока ДТ-15М на 15 кВт и одноступенчатый соосный планетарный редуктор с большим передаточным отношением. В качестве двигателя хода использовали 180-сильный бензиновый ЗИЛ-375 объемом 7000 см3, от него приводился во вращение генератор постоянного тока ГЭТ-120 мощностью 120 кВт. Вырабатываемый им ток напряжением 60 В и обеспечивал питание мотор-колеса. Система управления кроме бесступенчатого регулирования крутящего момента, подводимого к колесам, и реверсивности их вращения, обеспечивала электродинамическое замедление макетного образца и торможение двигателем. Чтобы предотвратить перегрев электромашин, для их обдува воздухом применили систему вентиляции из пяти компрессорных станций центробежного типа.
Проходимость улучшали, в частности, широкопрофильные шины 1200х500х508 мм с развитым рисунком протектора и специальная система, менявшая давление воздуха в них в диапазоне от 1 до 3 кгс/см2 (0,1...0,3 МПа). Колея передних колес по центру стоек составляла 2000 мм, а габаритная ширина макета – 3660 мм.
Самую совершенную для того времени синхронно-следящую систему рулевого управления сконструировали на предприятии «Дзержинец». При повороте колесных стоек вправо-влево на угол до 45° работа осуществлялась в двух режимах: по закону рулевой трапеции и параллелограмма. Стойки могли поворачиваться на 90° без промежуточных положений с возможностью подруливания в пределах ±10°. Переходом с одного режима на другой командовал водитель из кабины. Мозгом системы, реализующим алгоритмы управления, стали аналоговый блок, сельсин-датчики, сельсин-приемники и вспомогательная электроаппаратура. Поворот колесных стоек на нужный угол в зависимости от выбранного режима обеспечивали как электродвигатели с планетарными редукторами, установленные в верхней части опорных кронштейнов рамы, так и центральная стойка, приводимая во вращение электродвигателем с помощью червячного редуктора.
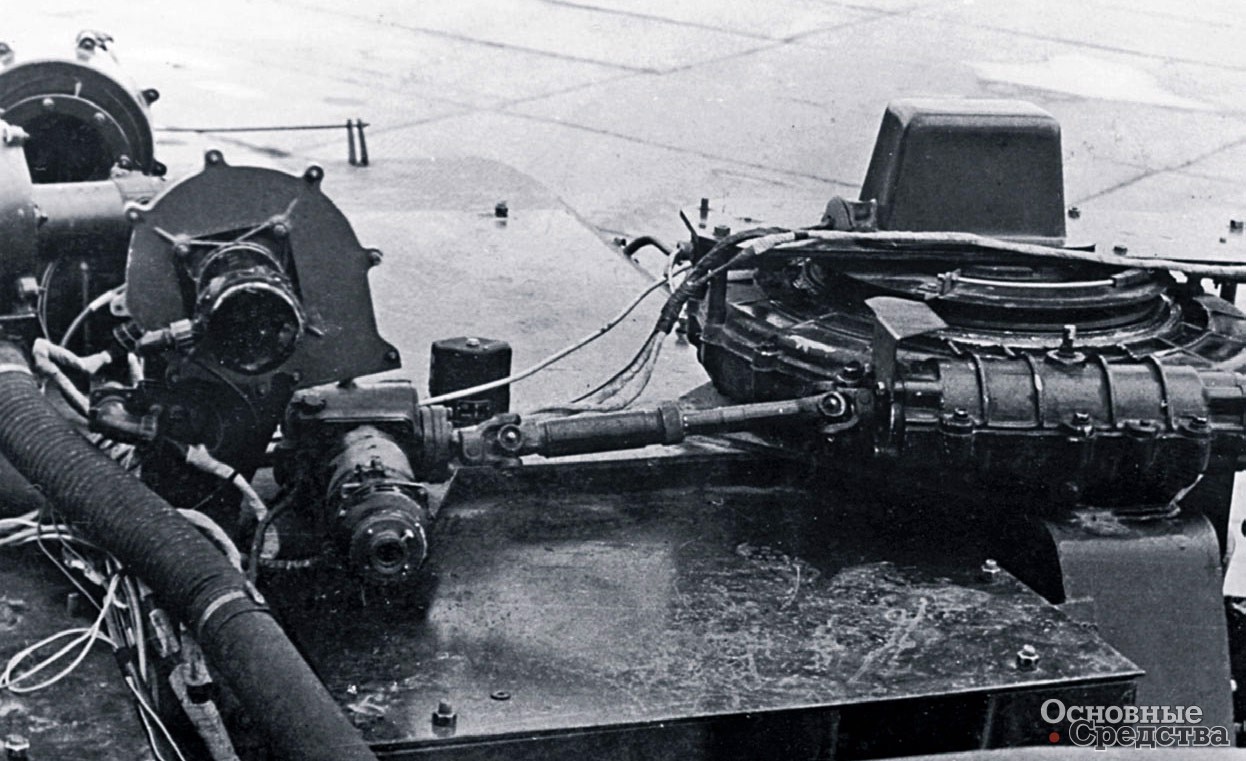
Аварийное движение автомобиля и улучшение проходимости на бездорожье достигалось применением второго двигателя ЗИЛ-375, который развернули маховиком вперед и расположили в задней части рамы. От него усилие на задний ведущий мост (от ЗИЛ-130) передавалось посредством гидротрансформатора, кинематически связанного с автоматической гидромеханической передачей (без демультипликатора), двухступенчатой раздаточной коробки ЗИЛ-157К и двух карданных валов. Задняя подвеска была зависимая рессорная. Стеклопластиковая кабина была вынесена далеко вперед, за пределы колесной базы. Грузовая деревянная платформа предусматривала оснащение съемными дугами и тентом.
Испытания макетного образца начались в конце июня 1967 г. Предстояло пройти рукотворные препятствия армейского полигона 21-НИИ вблизи подмосковного г. Бронницы, всесторонне проверить ходовые качества опытной машины. По бетонному шоссе, разбитому проселку, ровной сухой грунтовке, сухой и влажной луговине, влажному насыпному песку, сухой пашне, болоту пробег автомобиля за этот период составил 1000 км со средней скоростью 20,8 км/ч. Схема рулевого управления оказалась надежной и работоспособной. Автомобиль уверенно шел по узким лесным дорогам с крутыми поворотами. Средняя скорость движения по шоссе составила 25...30 км/ч, по грунтовой дороге – 15...20 км/ч, по луговине – 15...20 км/ч, по пахоте – до 10 км/ч. Максимальная скорость на автомагистрали была 60 км/ч. Получалось, что машина могла идти в общем транспортном потоке, не создавая помех.
Одновременно с испытаниями макета на полигоне в СКБ ЗИЛ полным ходом шла разработка основного изделия. Его грузоподъемность уже подняли до 120 т, что существенно перекрывало техзадание.

Для своего времени ЗИЛ-135Ш был по-настоящему уникальным изделием: максимальная скорость – 20 км/ч, колея – 11,2 м, габаритные размеры несущей рамы – 10,8х21,1 м, дорожный просвет – не менее 1 м. Рулевое управление – электромеханическое с индивидуальным приводом. Транспортер предполагалось оснастить восемью стойками с гидропневматической подвеской главной ноги от самолета Ил-18. Каждая стойка имела по четыре колеса, т. е. всего 32. Транспортер таких габаритов был с хорошей маневренностью, поскольку все движители могли синхронно поворачиваться в ту или иную сторону на угол до 90°. Для удобства водителей и сопровождающего персонала транспортер оснащали двумя просторными кабинами, расположенными впереди на раме по углам. Каждую кабину оборудовали кондиционером, переговорным устройством и видеомониторами, увеличивавшими зону заднего обзора с помощью телекамер. В комплект входила и радиостанция.
В 1976 г. проблема транспортировки крупногабаритных блоков ракетоносителей встала вновь, на этот раз в связи необходимостью транспортировать основные части космической транспортной системы «Энергия» – «Буран». Для выполнения этой задачи пришлось разрабатывать новые самолеты, тогда как ее мог с легкостью выполнить транспортер ЗИЛ-135Ш. Правильность выбранного СКБ ЗИЛ и ОКБ-1 пути подтверждает следующий пример.
| Снаряженная масса, т | 12,9 |
| Грузоподъемность (только на переднюю ось), т | 12,0 |
| Габаритные размеры, мм | 9460х3660х3120 |
| Колесная формула | 4x4+2х2 |
| Колесная база, мм | 4460 |
| Колея впереди по центру стоек/ сзади, мм | 2000/ 1790 |
| Минимальный радиус поворота по наружному колесу/ по внутреннему колесу, м | 5,1/ 4,15 |
| Скорость на бетонке, км/ч, не более | 60 |
| Двигатель | два ЗИЛ-375 V8 |
| Рабочий объем, л | 7 |
| Мощность, л.с. | 180 |
В январе 1976-го в печати появилось сообщение о том, что французская компания «Николя» создала платформу с гидравлическими подвесками колесных опор и автоматической системой управления, которая предусматривала возможность поворота колес на 30°, а ведь все это уже было реализовано в ЗИЛ-135Ш! Примерно тогда же целый ряд других европейских фирм продемонстрировали свои подобные установки. Все они теперь на продаже своих тяжеловозов делают неплохой бизнес по всему миру, в том числе в России.
Участники работ по отечественному транспортеру-тяжеловозу, отмечая уникальность разработки 1960-х годов, считают, что создание подобных транспортных средств остается актуальной задачей и сейчас, но теперь это можно делать на более высоком научно-техническом и технологическом уровне.




